牙科三维扫描仪市场的追随者们经常会被各种令人困惑的、宣称好用的产品冲击的眼花缭乱。很多时候,寻找信息的专业人士会被一些关键而又困难的问题所困惑,比如“激光扫描仪和白光扫描仪有什么区别”还有“我能否对比一下不同扫描仪所宣称的精确度的差别?”本文的用意就在于向读者提供三维扫描技术的基本理解,从而让读者更好地选择三维扫描仪制造商,并在选购扫描仪的时候做出一个知识的决定。
本文主要涵盖了扫描技术,并对扫描仪中常包含CAD软件方面作了很简单的介绍。
三维扫描仪的基本原理
只有一点除外,所有的三维扫描仪都是遵循着同一种基本原理而构造的。基本上,三维扫描仪都由一个光源、一个或多个摄像机还有一个运动系统组成,运通系统支持着若干个轴以使被扫描的对象向着光源和摄像机定位。光源把定义好的线条投射到对象的表面上,随后摄像机便得到线条的影像。根据已知的角度和摄像机与光源之间的距离(合称为扫描头),被投射光线所反射的三维位置可以用三角学计算得出。这种测量原理也被称为“三角形划分”,这个基本原理只对一个摄像机有效,但两个摄像机可以提高扫描的速度和精确度并加大扫描覆盖面。
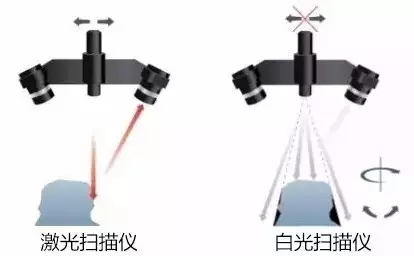
每条投射出来光线的线条都会产生一个三维轮廓线。所以,扫描头和对面的相对运动会产生多条线条,因而产生多个三维轮廓。激光扫描仪通过沿着一条精确的线性轴移动扫描头会产生多条线条,而白光扫描仪有的是一个固定的扫描头,可是它可以从一个中间位置连续投射若干个转向线团。
所以单从一般的扫描仪原理来宣称白光技术比激光技术先进,或者反过来,机关技术比白光技术先进,都是不可能成立的。
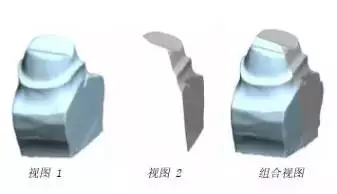
每个扫描头和对象相应的位置,即每一组轮廓,会产生一个单一的三维视图。所有的扫描仪都用预定义的运动脚本相应地移动扫描头至若干位置/视图,以便从所有方向来捕捉对象的表面。某些三维扫描仪可以支持高质量的机械运动系统,这样可以直接把所有三维视图转换为普通的坐标系统,然后简单地彼此附加。其他的三维扫描仪因为其机器精确度较低而不依赖其运动系统的质量,而只是通过探测至少一对视图的重叠区中相似的三维架构对齐三维视图。所以软件对齐在用于有清晰结构的对象时的效果最佳,如磨牙。
三角形划分为需要的是清晰地投射出来的光图案。理论上激光扫描仪和白光扫描仪都可以取得这些光纹。激光可以取得任何光源的线条宽度最小化(这是为什么它最适合用于指针上的原因),可是如果不细心加以控制,就会产生光斑——这是激光强度中的一点点不可测性。相反,白光摄像机则会受到影像模糊的折磨,因为白光的不同颜色组成部分的折射会稍微有所不同的缘故(即色差,一个“彩虹”效应)。
三维扫描仪所记录的清晰投射的光图也许不会比摄像机所拍得的质量好。因此光学和图像感应器两者均具有高质量就成为了供专业人士使用三维扫描仪的必要因素。今天的潮流是开发带高分辨率感应器的扫描仪——一些还高达五百万像素。
最后一个步骤中,从各个视图中取得的点云会转化为精美三角形的三维表面。
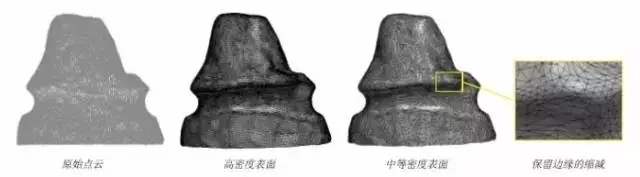
这是一种近似计算法,也在计算机图形学中使用。智能表面创建运算法是可取的,即用来保持一些相关的特性,比如边缘,在运用智能算法下,三角形的数学就可以显著减少,而无需牺牲精确度。一般地说,减少三角形的数量是最可取的,因为CAD设计软件处理三维图像的时间极大地取决于所产生的三角形数量。例如,三角形的数量翻一番可能会很容易地、至少以四倍因数增加软件处理的时间,否则的话,在有些情况下,甚至整个处理都会失败。
白光和激光两种三维扫描技术也同样广泛应用于工业应用和计算学领域。然后,激光扫描系统主导着坐标测量机器和其他高精度应用的市场。
精确度
目前还没有测量和确认牙科扫描仪精确度的通用标准。许多扫描仪制造商甚至不会披露他们是如何测量得出他们所声称的精确度。所以,市面上所声称的精确度——尤其是精确到20微米的区域是没有可比性的,甚至是无法确认的。
高精度测量学科——计量学一一将远远高于扫描仪的精确度应用于参照对象上。这些对象只有专业化的、经认证的公司或计量学技工所才能制造。通过指定并引入正确的诸如此类的相互参照对象,我们很清楚地看到不同的扫描仪品牌的运作是很不同的,也看到得出的结果多令人吃惊.
例如,某个扫描仪会在环绕某个边缘时出错,和正确结果竟然相差超过20微米。
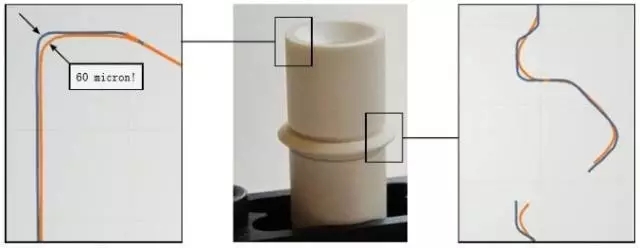
对于种植杆卡参照对象,测试结果显示出沿着就位方向有小于三微米的误差——即便种植牙座面水平。
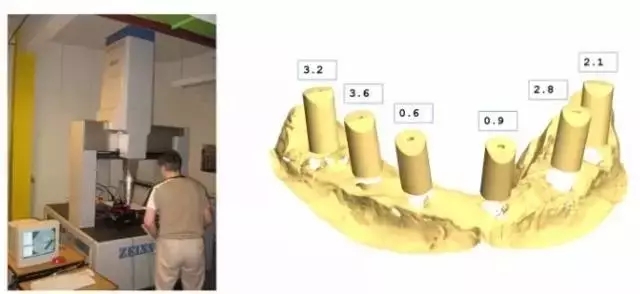
这种扫描误差是CAD公差链中的第一个,这个公差链在垂直方向上在支架与基台之间的不咬合度总共应达到低于10微米(最佳“被动式密合”)。尽管人们在争论10微米是否是一个切实可行的数值,但是至少已经有部分扫描仪似乎可以把这个理想带到现实中来了。
这是无可否认的物理学定律,一切物质——由此推断扫描仪硬件亦然——会因为温度变化而膨胀和收缩。扫描仪硬件也会受到野蛮装卸的影响。例如在运输过程中,对于大跨度齿桥和种植杆卡这些要求很高的工作,在扫描仪被移动后或技工所的温度有变化时,重新校准扫描仪尤其至关重要。尖端的扫描仪都带有特别的校准对象,这些对象都有远远高于扫描仪精确度性能的已知精确系数。软件运算法无法补充温度效应,因为扫描仪硬件本身包含焊接点、紧固点、胶合部分、不同负载量等等,因此易受非常复杂的膨胀收缩的影响。
精确度同样受到扫描仪制造质量的影响。较大的三维扫描仪制造商一般都有较好的生产设施和工具,而且还可以使组装步骤中的某些部分自动化,包括出品时的质量检验。他们因为把产品的不定因素降到了低于单靠人工生产操作能获得的水平。较大的制造商通常在财务上也比较稳定,因而也最有可能持续经营并提供长期支持。
扫描速度和产量
扫描速度是选择扫描仪的重要参数,因为扫描时间决定整体产量的重要因素。就如精确度一样,扫描速度也没有什么标准可以使其易于与市场的营销材料和所宣称的内容相比较。在没有公认的参照物情况下,凭经验对比后发现对于同一个基本的代型,所宣称的扫描时间可能在30秒到几分钟之间变化。较严格的制造商会就所选定的只要指征披露他们的扫描时间。
一般来说,单单研究扫描时间值并不会发现扫描仪在产量方面的能力。技工所需要考虑整个工作流程,从创建订单开始到制成一个完全可供CAD设计使用的三维扫描结束。这自然不只跟扫描仪硬件有关,还跟驱动系统有关。从这个角度对比不同的扫描仪品牌的产量会发现更大的性能变化。
高度自动化可以让用户缩短整个扫描过程的时间。自动化同时还可以降低人工出错的可能性,因为有利于避免返工——这是所有错误中最花时间的。例如,通过人工控制的摄像光亮度调节可能会导致图像过分曝光,这样投射的光线线条就不再可能被探测到。
某些硬件的功能可以节省处理时间。在没有操作者的情况下,扫描仪在一根代型传送杆或多代型板的作用下可以工作许多分钟。一个技师可以同时使用多台扫描仪工作,或者有效利用空余时间在CAD软件中设计修复体。优良的种植牙钉可以减少失败的次数,这是令人恼怒的浪费时间的根源。
对扫描速度最真实的信息来源很有可能会在用户评价(尤其是关于失败率的评价)中,以及显示整个扫描过程的视频中找到。
其他功能
除精确度和扫描速度外,一些牙科扫描仪之间还有其他几个重要的差别。技工所应该考虑的一个重要问题,就是扫描仪所支持的适应范围的大小,例如大跨度齿桥、定制的基台、精确的种植杆卡和可摘局部义齿。有太多低端的不可升级的扫描仪只会支持非常基本的使用范围,因为限制了技工所的发展,表现出疲软的长期投资。
扫描仪支持的适应范围不可被分别地看待。和扫描仪一起工作的CAD软件也需要支持这些使用范围。总体来说,研发扫描仪和CAD软件两者的制造商一般会提供更好的、更优化的工作流程,以及带有完全整合的解决方案——尤其是针对使用范围支持和界面友好性。
我们预计,那些“只可扫描石膏”的老旧扫描仪终会过时,印模扫描将有望成为最为广泛应用的三维扫描方式。印模扫描对于三维扫描仪是尤其具挑战性。深度空腔会让摄像机和光源同时既照明又观察深度表面的点变得困难,可这是重新建造三维模型的基本要求。
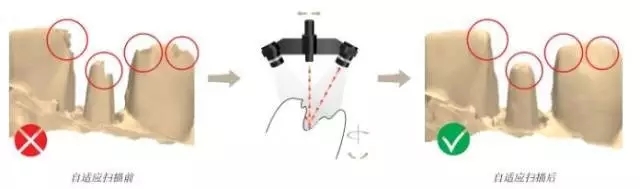
有一种技术(“自适应印模扫描”),这种技术会应用软件来寻找摄像机和位置的最佳组合以重新扫描未覆盖的区域。其他制造商用的是运动脚本,这样既话时间,预定义又沉缀。
牙科扫描仪配有内置的电脑。虽然这样会降低空间的要求并便于运输,但这样会带来重大的投资缺陷。
扫描仪电脑一般需要两到三年就更新一次,这是由于操作系统和CAD软件的需求在日益增长,而内置电脑就常常很难更新。
总结
因为我们欠缺公认的标准,就连牙科扫描仪的最基本的功能标准都没有,对于许多在寻觅着合适的扫描仪的技工所来说,三维扫描仪市场会很令人困惑。在对比三维扫描仪的时候,技工所应当考虑以下检核清单:
● 精确度——以经认证的参照对象记录
● 扫描和工作时间——对已明确界定的适用范围
● 所支持的适用范围的广度——大跨度齿桥、种植牙杆、可摘牙杆
● 实用的功能——印模扫描、纹理扫描、代型传送杆、校准对象及500万像素摄像机。
最后,我们强力建议在最终做出购买决定前总要测试一下扫描仪。广告和手册可能都做出了各种各样的承诺,但在实际操作的生活这些承诺未必都能兑现。
对于未技工所做的如此重要和长期的投资,彻底调查市场情况并质询那些资料不足的制造商所宣称的产品是理所当然的。
【版权归作者所有,雅登特整理发布】
文章来源于:牙科技工所三维扫描仪—工作原理和最佳用途 作者:Karl Hollenbeck 博士、Thomas Allin 博士、MIke van der Poel 博士
转载请联系作者授权






